Collective response of microrobotic swarms to external threats
A central reason why living organisms assemble into collective states is that it enables them to perform tasks beyond what can be achieved by single group members
A central reason why living organisms assemble into collective states is that it enables them to perform tasks beyond what can be achieved by single group members. Examples found in nature include the collective lifting of loads by insects and the increased vigilance and response of groups towards threats, e.g., predators. Opposed to the formation mechanisms of collective states itself which are by now rather well understood, only little is known how this leads to benefits at the group level.
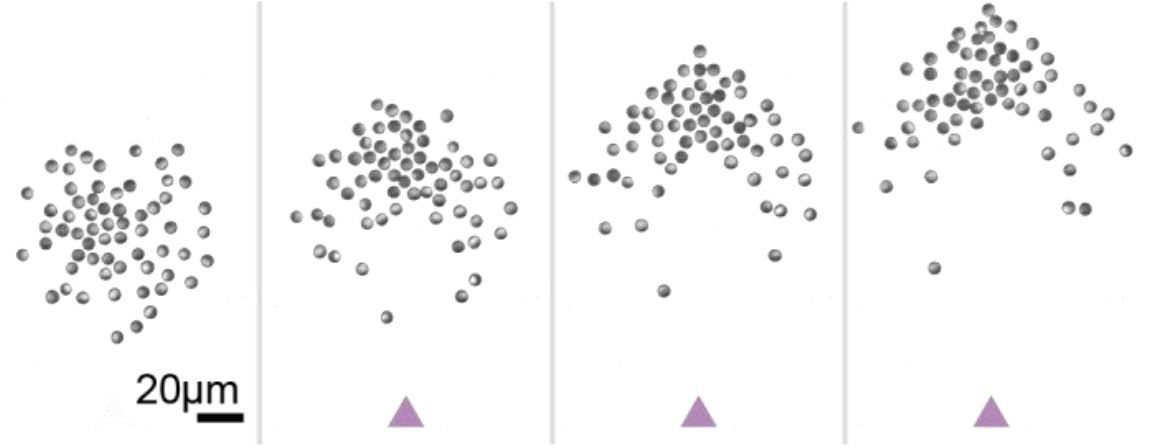
Here, we experimentally demonstrate with a system of programmable interacting active colloidal particles, that their response to a static threat can be largely enhanced compared to single particles. Opposed to escape strategies in numerical simulations where the response to predators is modelled by a repulsive particle-predator interaction, in our policy the appearance of a predator only slightly changes the interaction amongst particles. As a consequence, we obtain a remarkably robuts escape mechanism of the group which remains intact even when half of the group members are inattentive to the threat. We demonstrate that partial or missing information of individuals regarding the predator (or otherwise adverse environmental conditions) can be compensated by animal-inspired collision avoidance events with other group members which then leads to a rapid spreading of information within the group.
Collective response of microrobotic swarms to external threats
C.-J. Chen, C. Bechinger
New J. Phys. 24, 033001 (2022)